Inference Best Practices#
2D inference best practices#
When running the 2D inference module on images of a given size for the first time, results can be slow. After inference is run twice on a particular size, it will be much faster. This is because pytorch is performing optimization in the background to make the model faster on your system’s hardware.
Note
When using Multi-GPU inference there’s some overhead associated with the creation of a process group. This overhead can make Multi-GPU inference slower on small volumes. Therefore, we don’t recommend using it unless working with datasets larger than 1 GB.
However, in such cases, the inference speed-up is nearly linear (segmentation will be 4x faster with 4 GPUs than with 1). As more GPUs are added, inference starts to become CPU bound (i.e., the segmentations are being created faster on GPU than they can be processed on CPU). There can be a long delay between inference and backward matching as the CPU processes work to catch up.
We’ve found that models can give considerably different results based on the resolution of the input image. Our models work best at 15-40 nm pixel sampling, and model inference is faster for smaller input images, so you’ll want to use the biggest Image Downsampling factor that still gives satisfactory results (see example below).
Downsampling example:
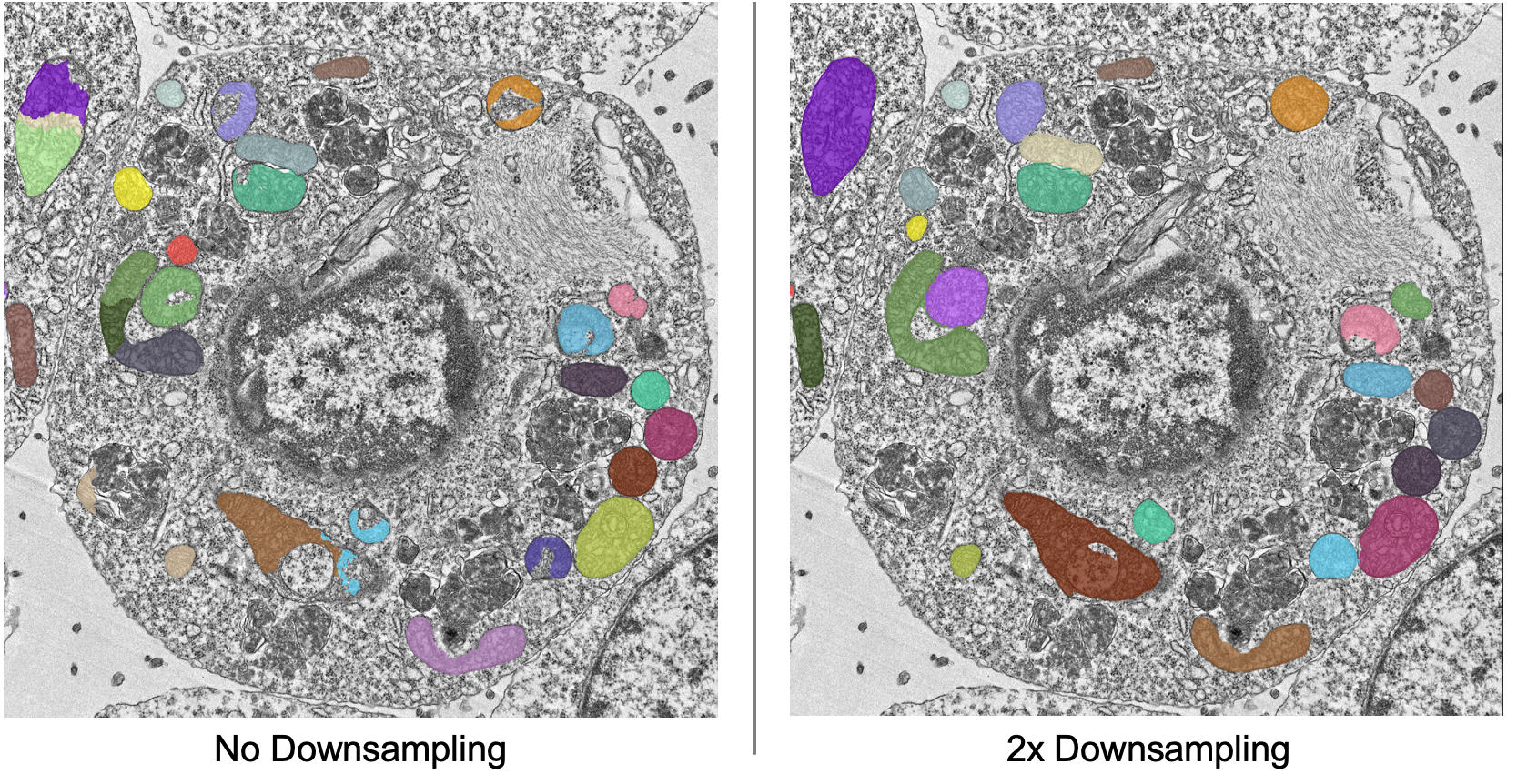
Here downsampling by a factor of 2 significantly reduces over-splitting errors and results in a better pixel-level segmentation. Plus, the smaller image size means that model inference will be faster and use less memory! The takeaway is that it’s important to test different downsampling factors on new datasets to see which is best.
Note
Always opt to use the largest downsampling factor that gives satisfactory results. Too much downsampling will result in more false positive detections and more false negatives for small objects in particular.
Tweaking the Segmentation Confidence Threshold will change how many false positives (FPs) and false negatives (FNs) you get; for MitoNet, we often see that 0.5 or 0.4 works well, whereas for NucleoNet, 0.6 gives better results. but for a well-tuned model, often works as a proxy for erosion and dilation of labels. Because ortho-plane inference averages segmentations from 3 views, using a lower confidence threshold is sometimes beneficial: try 0.3 instead of 0.5.
The Center Confidence Threshold and Centers Minimum Distance parameters both control how “split up” instances will be in 2D. Raising the confidence threshold will result in fewer object centers and therefore fewer instances in the segmentation. Increasing the minimum distance will filter out centers that are too close together. This can help if long objects are being over-split. If you notice that the borders between instances are too “blocky”, selecting the Fine boundaries option may be useful. However, this comes at the cost of 4x more memory usage during postprocessing, so use it wisely!
Try checking the Restrict to Viewfinder box to check some of these parameters quickly - inference will only run on whatever patch is visible in the main window.
Note
napari is bad about retaining xy coordinates, so while your original inference will be correctly overlaid over the grayscale image, any other processing (filter labels, morph labels etc) will result in the viewfinder patch segmentation displayed at top left of original image.
The Max objects per class can also be thought of as the label divisor. That means, when the model used to run inference has a label divisor of None, simply put 0 in this box. This will start the label IDs at 1 (see note). To determine label divisor used by the model, open the Get model info module and print the model’s description in the terminal.
Note
You can keep the Max objects per class at the preset value of 10,000 even if the model’s label divisor is None. This will just start the label IDs at 10001.
2D inference using batch mode and output to layer#
Selecting the Batch mode option in the 2D Inference (Parameter Testing) module, will apply the adjusted parameters to each image in the stack. The label ID values for each image in the stack, will begin at the Max objects per class + 1. (See above for more details).
The Output to layer and output layer box are used when running inference on patches or flipbooks created in the Pick finetune/training patches module. However, you can not use Batch mode with the Output to layer option. Instead, you can simply run 2D inference using batch mode, then create the finetune/training patches and select the Pick paired data option.
Note
Remember when applying any edits to your segmentations after using batch mode, keep the Apply in 3D box unchecked! See Proofreading Best Practices for best practices and other tips and tricks!
3D inference best practices#
Depending on the size of the volume, 3D inference can take some time even with a GPU, therefore it’s highly recommended to test out inference parameters beforehand using the 2D inference module. The 2D inference module will run inference on whatever image slice the viewer is pointed at in napari. This means that parameters can be tested on xy, xz and yz slices by flipping the volume and scrolling through the stack.
Tip
If results appear substantially better on slices from a particular plane, then use this as the Inference plane for 3D inference. Similarly, if results on xy slices are good but results on xz and yz slices are poor, then using ortho-plane inference is not recommended.
The most important 3D parameter is the Median Filter Size. This smooths out the stacked segmentations. The best kernel size is typically a function of voxel size. Lower-resolution volumes (>20 nm) that have relatively more change between consecutive slices usually benefit from a smaller kernel size like 3. Higher-resolution volumes (<10 nm) have much less change across slices and a kernel size of 7 or 9 can work well.
The Min Size and Min Extent parameters filter out small objects and segmentation “pancakes”. The optimal size is strongly data-dependent. As a rough estimate, try drawing a bounding box around a small object that you see. Divide the volume of the box by 2 to get the approximate volume of a sphere that would fit inside that box. Pick some number a few hundred voxels below that threshold as your min size. Likewise, the min extent should be a few increments less than the smallest dimension of the bounding box.
The Voxel Vote Threshold Out of 3 and Permit detections found in 1 stack into consensus are options for when there are too many false negatives after ortho-plane segmentation. Decreasing the voxel vote threshold to 1 will fill in more voxels but should not increase the number of false positive detections very much. This is because the voxel vote threshold only affects detections that were picked up in more than 1 of the inference stacks. Permit detections found in 1 stack into consensus, on the other hand, can increase false positives because it will allow detections picked up by just a single stack into the consensus segmentation (what a well named parameter!).
When running ortho-plane inference it’s recommended to also Return xy, xz, yz stacks segmentations. In some cases, inference results are better on just a single plane (i.e., xz) than they are in the consensus. Returning the intermediate panoptic results for each stack will help you to decide whether that applies to your dataset or not.